

スマホ/PC/タブレットで操作するNゲージ用のPWMコントローラを作ってみた。
Nゲージターンテーブル・・いざ回転

固定式レイアウトの機関区に設置しようとしている転車台(ターンテーブル)。
ワールド工芸のディスプレー用であるが、あわよくば可動式に、と目論んでいる。
駆動用のパーツの組込みが終わったので、いざ回転じゃ~。
動画
概略
・・回転の前に、停止させるためのセンサーについて。
転車台の裏側につけたプレートには穴があけてあり、この穴を透過型フォトインタラプタ―で検出して転車台の位置を判定することにしている。
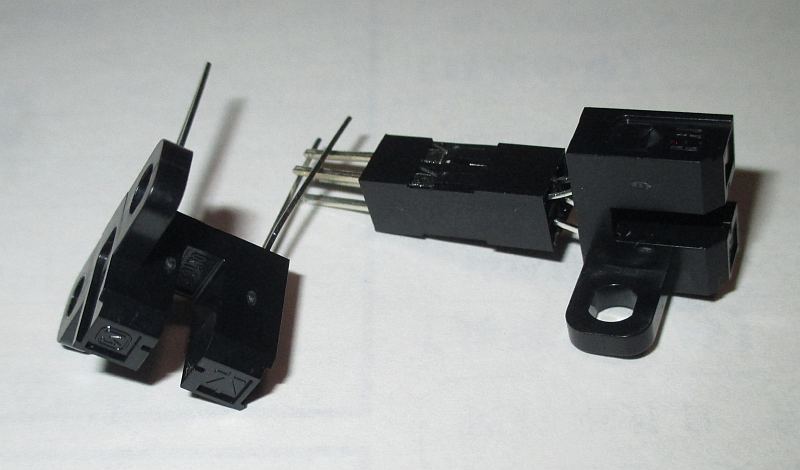
(写真上) これが透過型フォトインタラプタ―。
故障した時に交換が容易なように端子の部分にデュポンコネクタのハウジングを取り付けた。
ここで配線とフォトインタラプタ―本体の分離ができる。
(写真上) 転車台の裏側につけたプレートの穴は3個の透過型フォトインタラプタ―で検出する。
初期位置の検出用、右回転時の検出用と左回転時の検出用である。
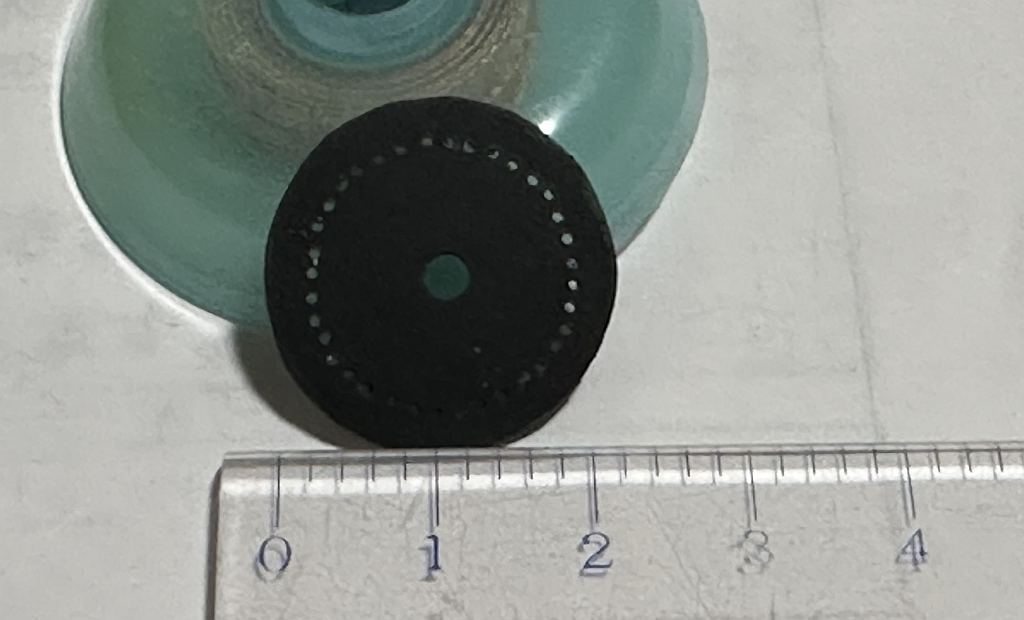
(写真上) さらに、もう少し細かく軸の回転を検出できるようにギヤーボックスの軸にもセンサーを取り付けることにした。
φ20ほどの円盤に0.7mmの穴を36個あけている。
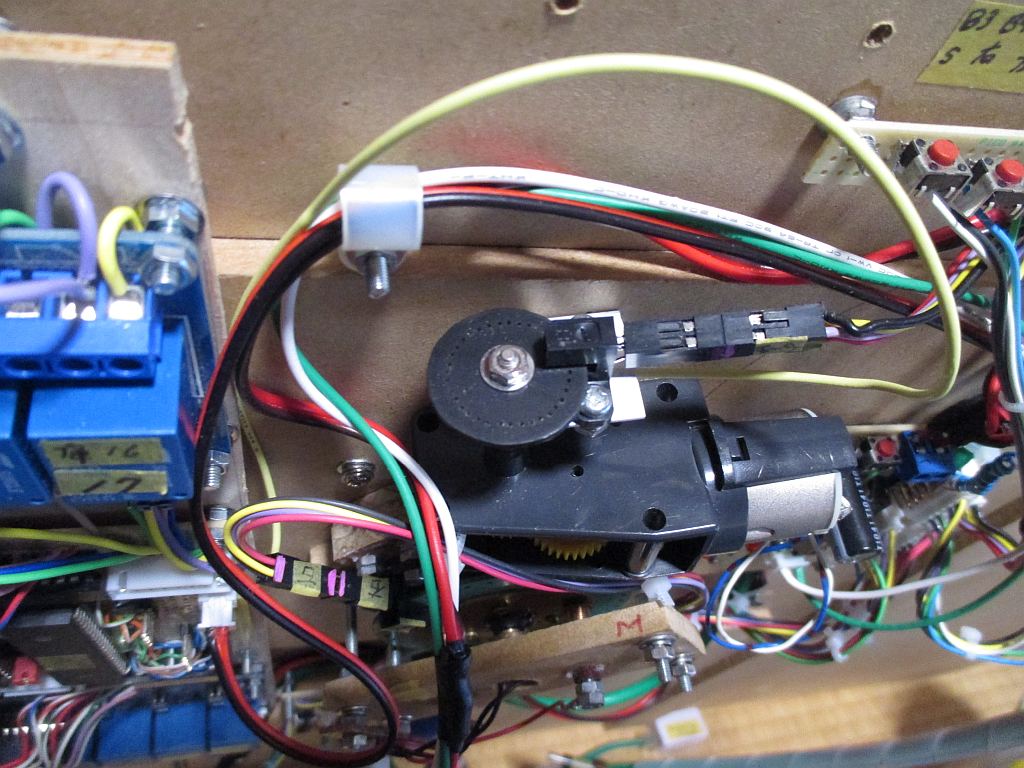
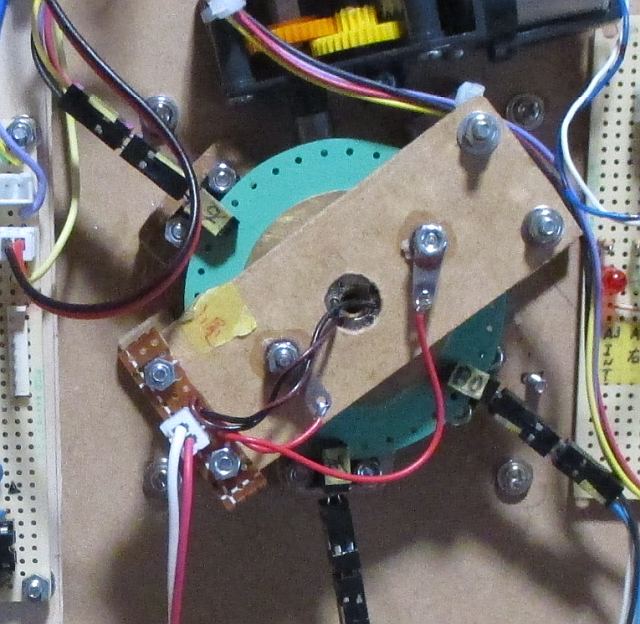
(写真上) プレートとフォトインタラプタ―はこんな感じでギヤーボックス横に設置。
実測値では転車台が10°回転する間・・つまり緑色のプレートの穴から次の穴を検出するまでに・・ギヤーボックス横のプレートの穴は約3回検出できるみたい。
【約】3回というところがねぇ。
汎用のギヤーボックスやらディファレンシャルギヤーやらを使っているので致し方ないところ。
あとはプログラムでなんとか停止位置を補正するしかないですなぁ。
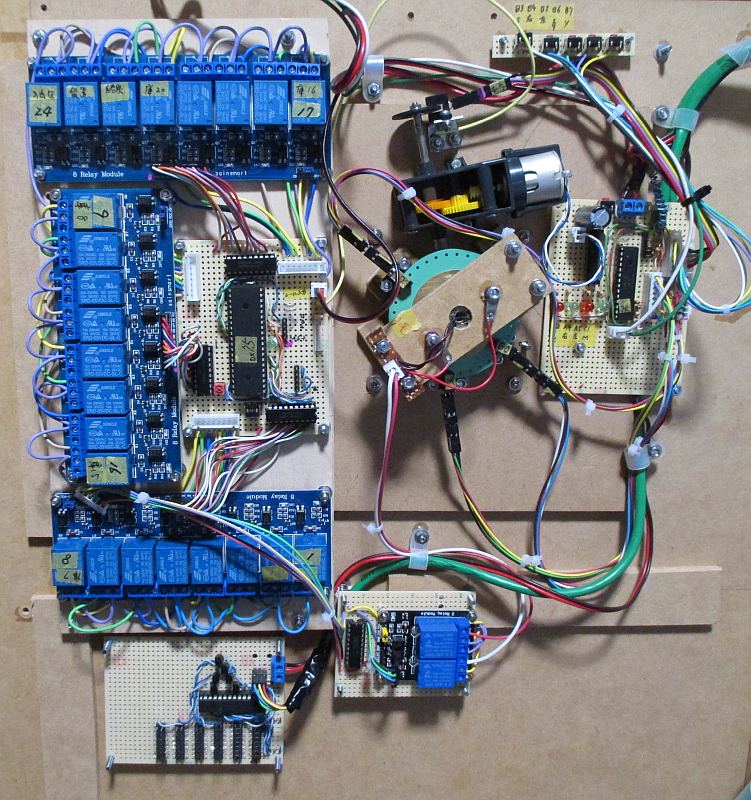
(写真上) ターンテーブルの裏側はいろんな基盤でゴチャゴチャになった。
これもメーカーが量産品として作っているものと、ディスプレー用をワンオフで可動式にしようとしているものの違い。
致し方あるまい。
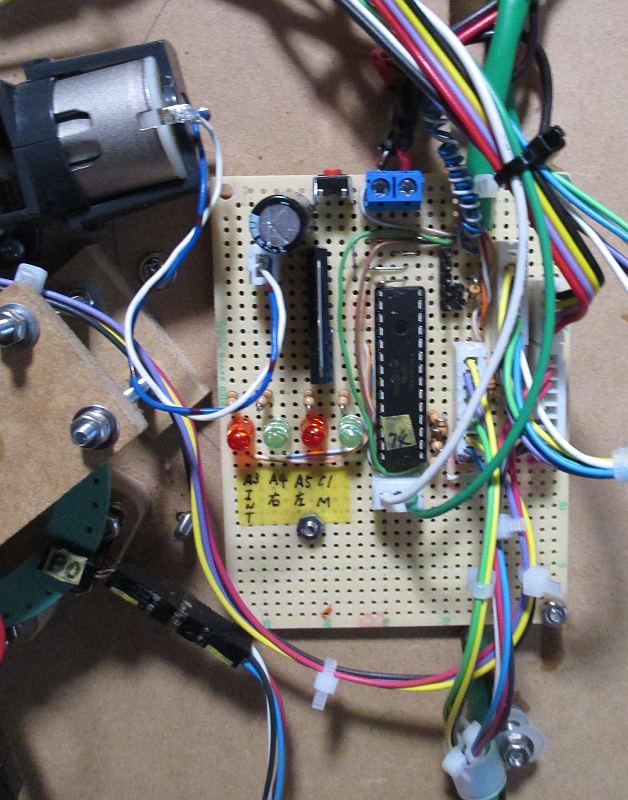
(写真上) モーターの回転/センサーを制御する基板。
センサーの位置の調整を容易にするために穴を検出した時に点灯させるLEDも設置している。
調整が完了したら省電力のため上位のマイコンからI2C経由でコマンドを送信し非点灯とさせることもできるようにした。
(写真上) モーターの回転を直接制御するのはDCモータ用フルブリッジドライバ「TA7291P」。
(写真上) 「TA7291P」やフォトインタラプタ―を制御してモーターの回転と停止を制御するのはPICマイコンの「PIC16F886」。
何番線まで回転させるのか、左右どちらの方向に回転させるのかを指示するのは上位のマイコンからI2C経由で指示する。
(写真上) 機関庫への走行電源の供給は転車台上のレールと機関庫のレールを接触させる方法が考えられるが、工作精度が高くないと転車台回転時に突っかかり原因となる可能性が高そう。
なので、機関庫のレールと転車台上のレールとは分離して給電することにした。
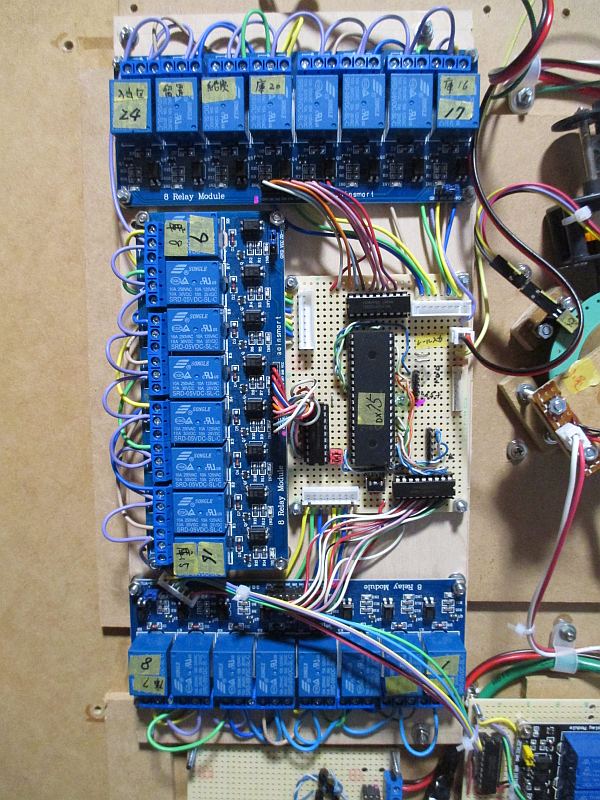
マイコンとリレーモジュールを使用して指定された番線に通電させる。
このため、転車台を回転させなくても任意の庫内の機関車を少し前後進させたりすることもできる。
が、このリレーモジュールが場所を取りすぎたようですなぁ。
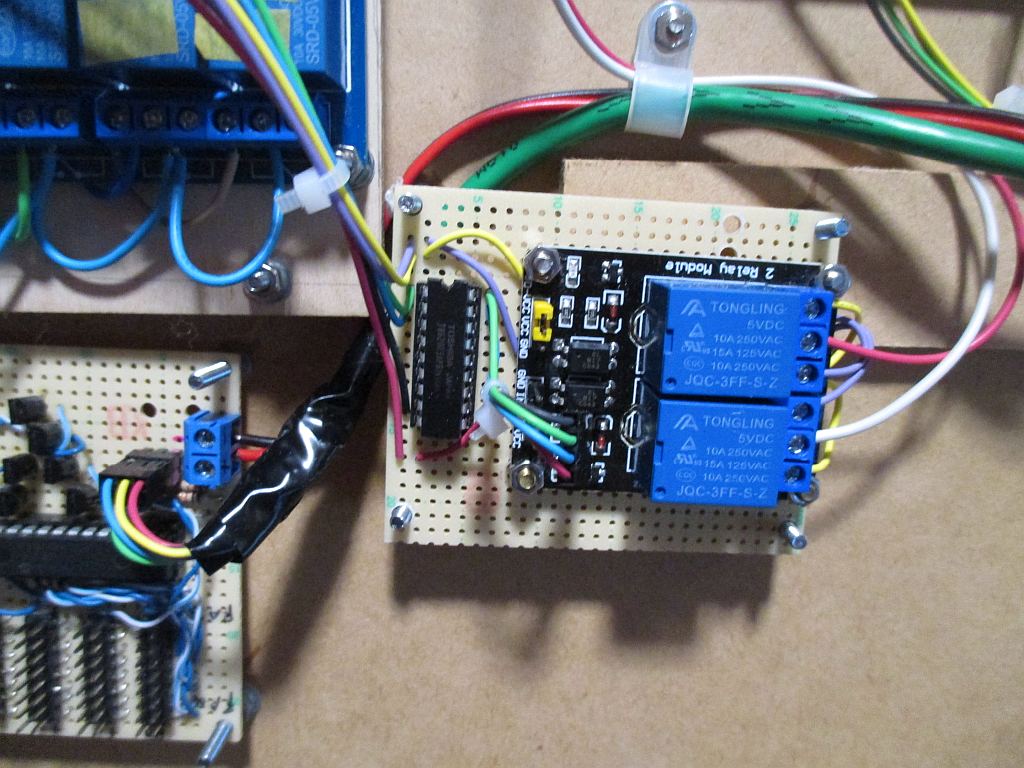
(写真上) 転車台を回転させると転車台上のレールの極性を反転させたい場面もある。
これもマイコン+リレーモジュールで制御する。
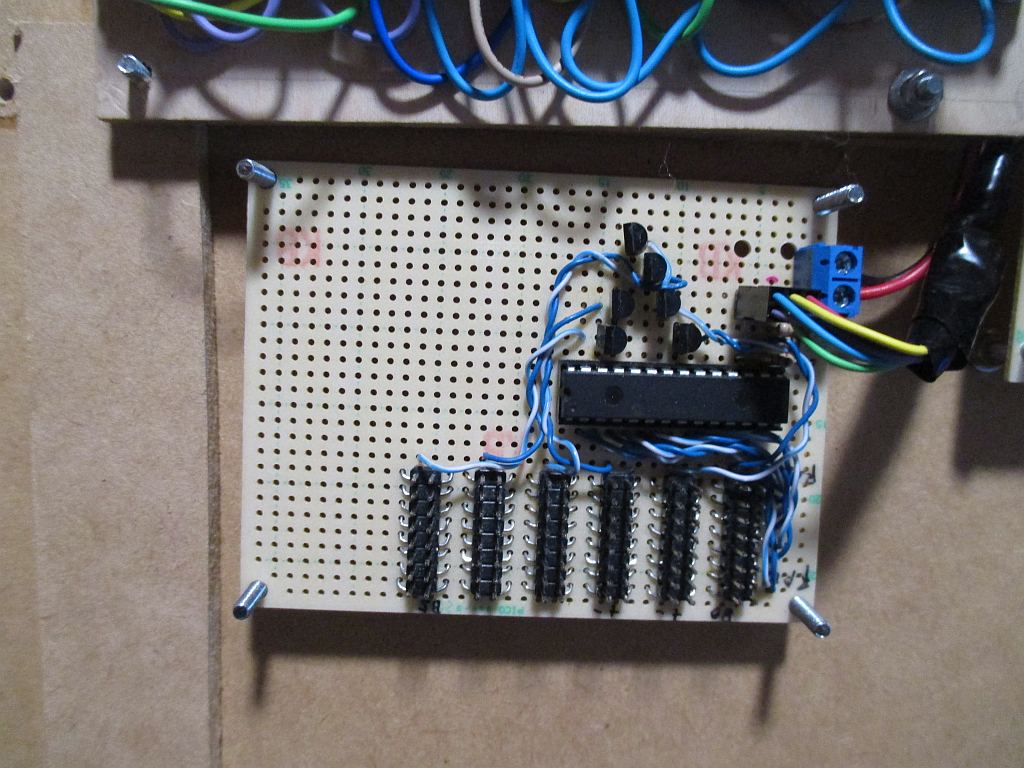
(写真上) 機関庫内の照明はマイコンを利用してLEDをダイナミック点灯させる。
ダイナミック点灯は消費電力を抑えられる反面、点灯させるLEDの数が増えると暗くなるというデメリットもある。
しかし、実際の機関庫内も薄暗く点灯しているイメージがあるので、ちょうどよいかも。
やはり、転車台をとりまく桁の部分はワールド工芸の物は真鍮エッチングバーツだけあって、TOMIXやKATOのものより精密感があっていいですなぁ。
駆動部はいろんな模型用のパーツを寄せ集めた自作のものとなったが、ひとまずは回転しただけでも万々歳!!
記事の続きは
・・「Nゲージターンテーブル・・突っかかり対策」
この前の記事は
・・「Nゲージターンテーブル・・駆動パーツ組込み」
趣味の部屋
カテゴリー 「railway/turntable/」
🕒️
見つかりません



