製作を開始したNゲージレイアウト用制御盤。前回は、電源部分やら、音を出すモジュールの基盤を取り付ける箱の部分を作った。今回はその箱の天板部分にコントローラを設置するスペースの加工を行ってみた
ポイントマシン用ステッピングモーターの制御基板 (その4)
PICマイコンとステッピングモーターを使ってスローアクションのNゲージ用ポイントマシンを作ろう・・
の進捗状況
4個の基盤を作った。
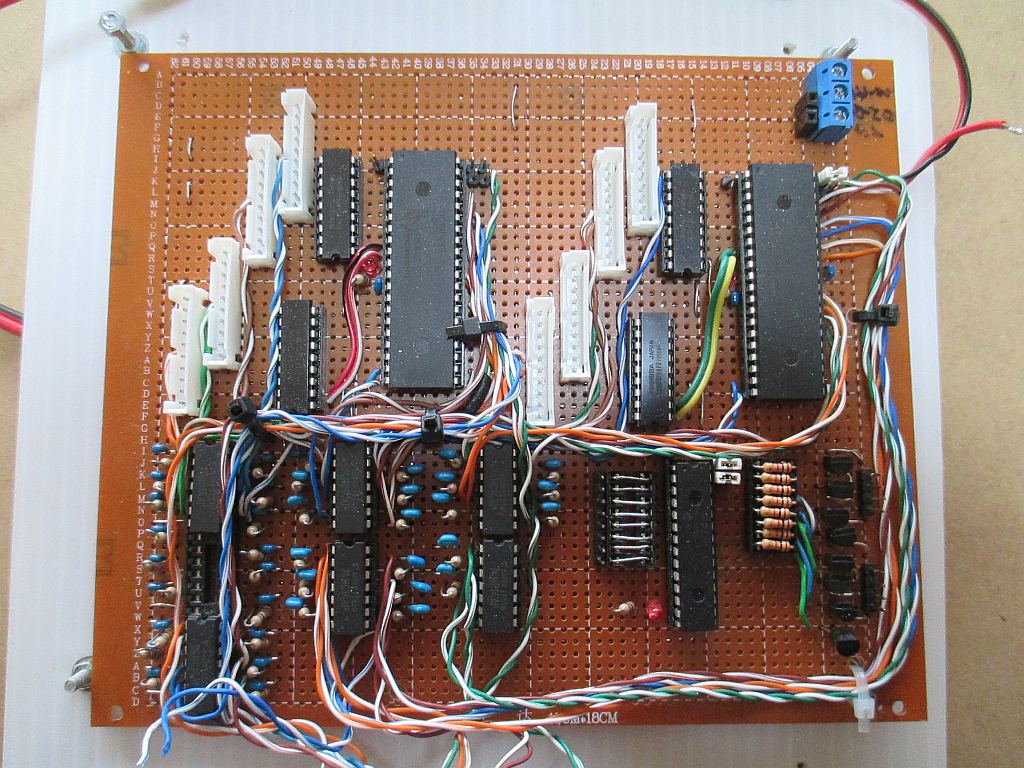
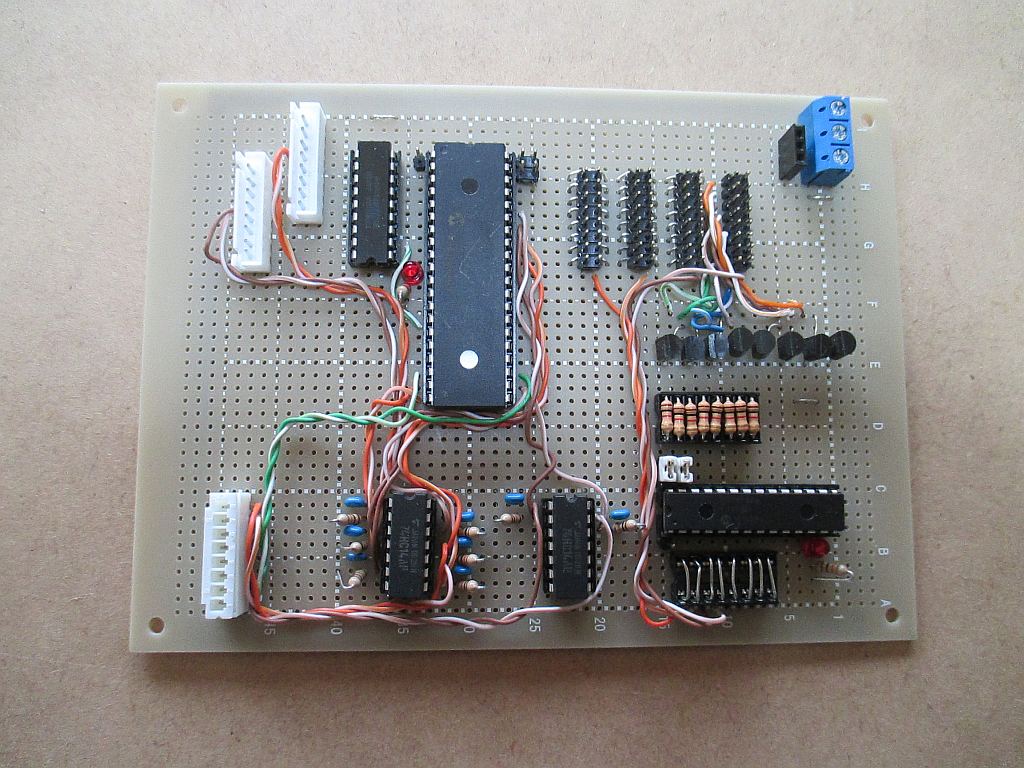
(写真上) 基板・・その1
レイアウトのメインとなる台枠上にはポイントが12個。
そのうちの8個はレイアウト左側に集中している。
この基板はその8個のポイントマシンを制御する。
白い部分がステッピングモーターを接続するためのコネクタ。
LANケーブルを介してステッピングモーターを接続する。
(写真上) 基板・・その2
メインとなる台枠上の右側4個のポイントマシンを制御する基板。
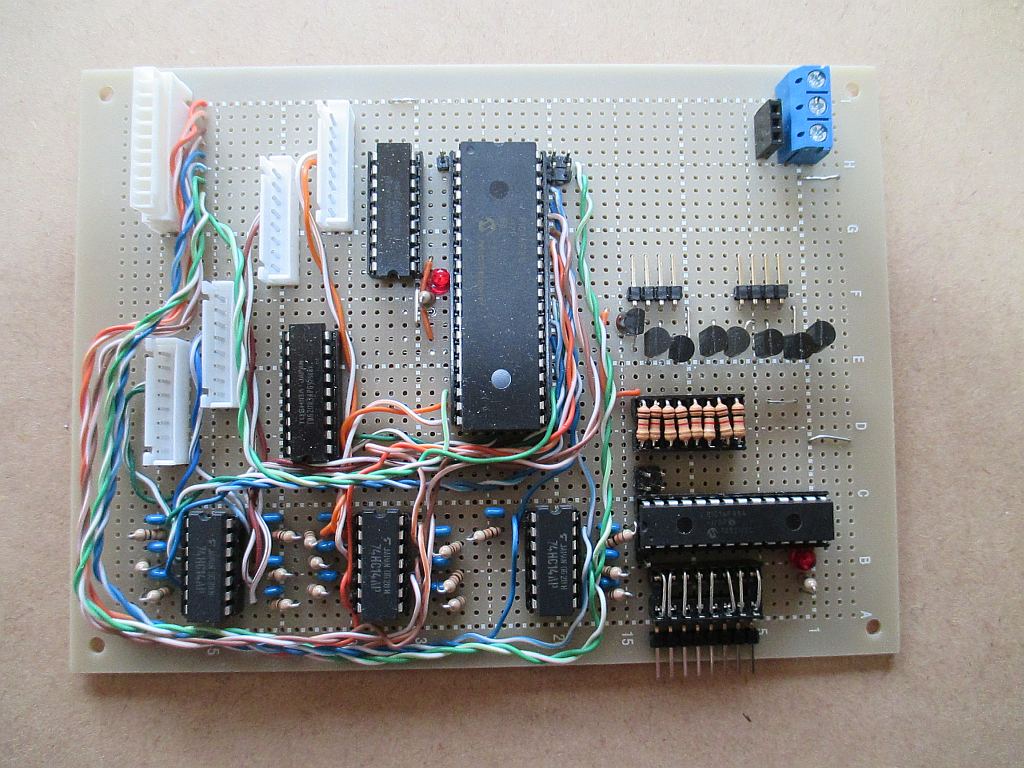
(写真上) 基板・・その3
メインとなる台枠からコの字状に突き出る形で接続される台枠のポイントマシンを制御する基板。
3個のポイントマシンを制御する。
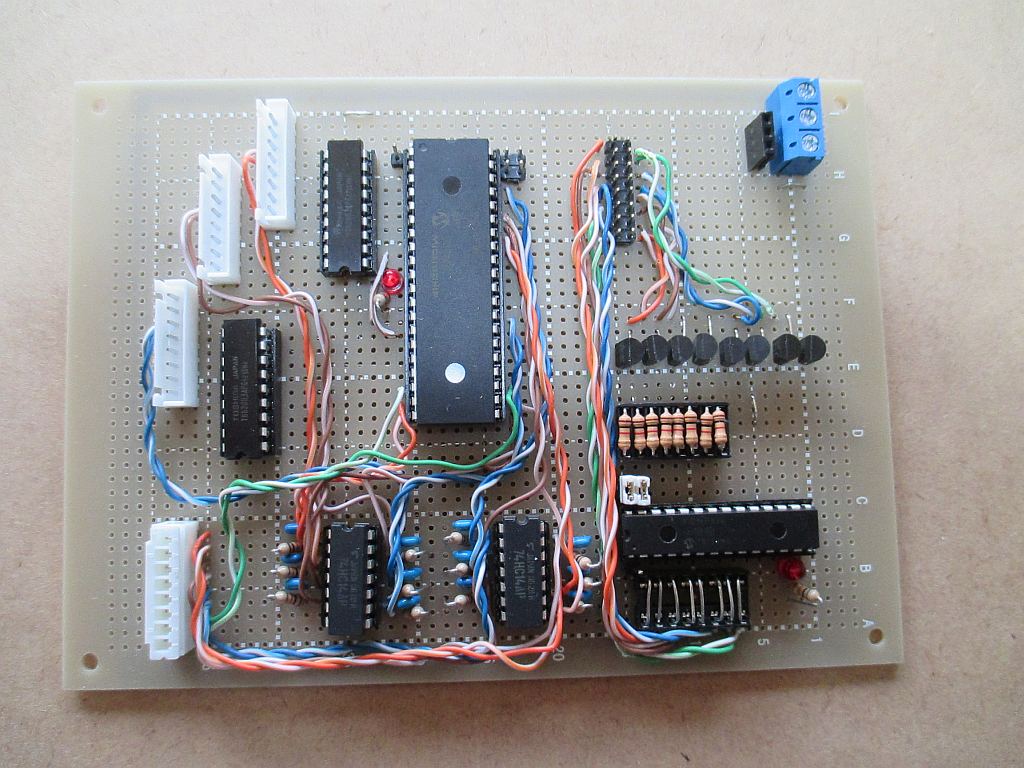
(写真上) 基板・・その4
メインとなる台枠からコの字状に突き出る形で接続される残り1個の台枠のポイントマシンを制御する基板。
2個のポイントマシンを制御する。
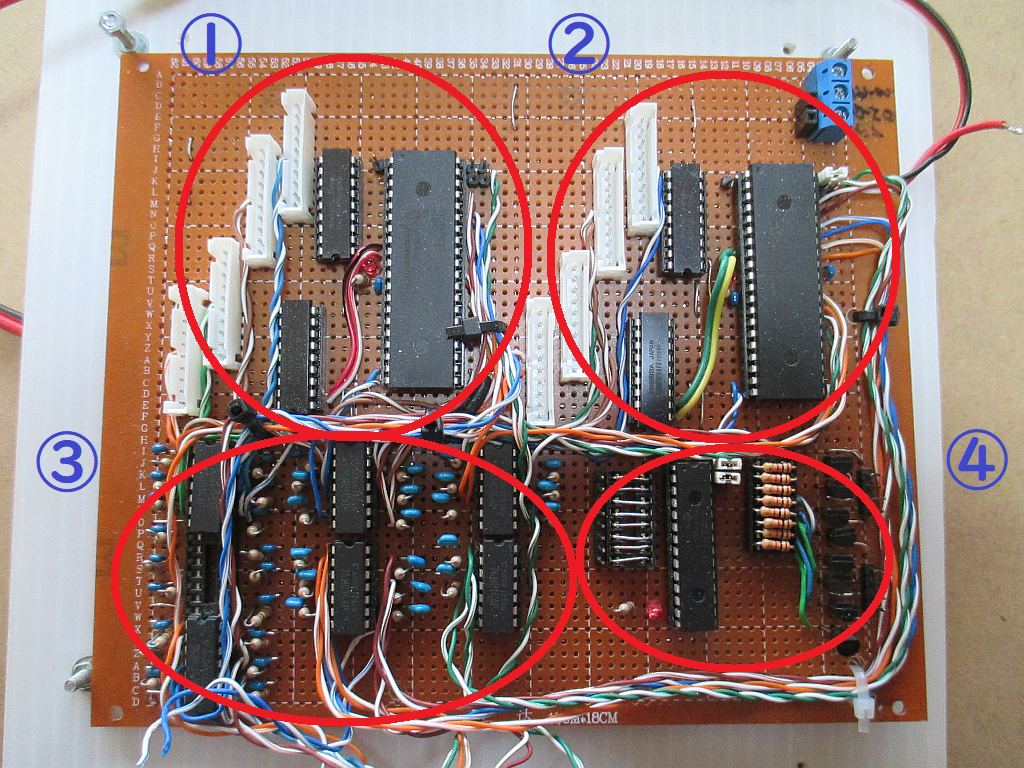
制御基板上の構成
ポイントマシン用ステッピングモーターの制御基板上の構成は基本的には同じ。
(写真上)
1、2の部分
ステッピングモーター制御用のPIC16F887。
3の部分
停止位置を検出するためのスイッチのチャタリング防止用のHD74HC14。
4の部分
レイアウト用の信号機を点灯させるPIC16F886。
ステッピングモーター制御用のPIC16F887は1つのマイコンで4個のステッピングモーターを制御できる。
でかいのがPIC16F887。
その左どなりにあるのが実際にモーターを回転させる8chダーリントンシンクドライバTD62083APG。
ポイントが切り替わったことを検出するために1つのポイントに2個のスイッチを使用し、PIC16F887に入力する。この時のスイッチ入力のチャタリングを抑止するためのものが3の部分のHD74HC14。
4の部分のPIC16F886はレイアウト上の信号機を制御する。
1つのPIC16F886で最大64個のLEDをダイナミック点灯(複数のLEDを高速で点灯、消灯を切り替える。消費電力を抑えることができ、1つのマイコンで多数のLEDの点灯制御ができる。)で点灯させることができる。
実際に点灯させるLEDはまだ決定していないので、どの程度の抵抗をかませてLEDにかかる電圧を下げなければならないかわからない。
なので、基板にはIC用ソケットを取り付け、そこに抵抗を指すことでハンダ付けなしで調整できるようにしといた。
ただ、点灯されるLEDの数が多くなればなるほど1つのLEDに電流が流れる時間が短くなる。
現時点でMAXである64個のLEDを点灯させるプログラムを作って、20個程度のLEDをつないで点灯させてみたが、抵抗はかまさなくてもLEDに定格以上の電圧はかからないみたい。
・・まあ、プログラムの作りによって抵抗なしでも良いようにできるってことが検証できたってことですな。
・・が、レイアウト製作までに月日が流れすぎた
2022年12月
サーボモーターの価格は下がってしまった。
機構が複雑になるが、安価にできると思って作ってきたステッピングモーターを使ったポイントマシンは・・却下。
紆余曲折の経緯は置いておくとすると・・
結論としては・・レイアウトにはサーボモーター版を取り付けることにした。(^^;
↓ これです。